Real World Yaw Angles
To develop the fastest rim profiles, we need to understand how to apply real world conditions to a controlled test environment in the wind tunnel.
As part of our technical partnership with the Sports Engineering Department at Nottingham Trent University, we launched the #thinkwider project to analyse wind conditions at multiple points on the bike, specifically the front and rear wheels.

Wind tunnel testing
Testing is carried out in controlled conditions, with fixed yaw angles.
Real world riding
Wind is completely variable with conditions changing constantly.

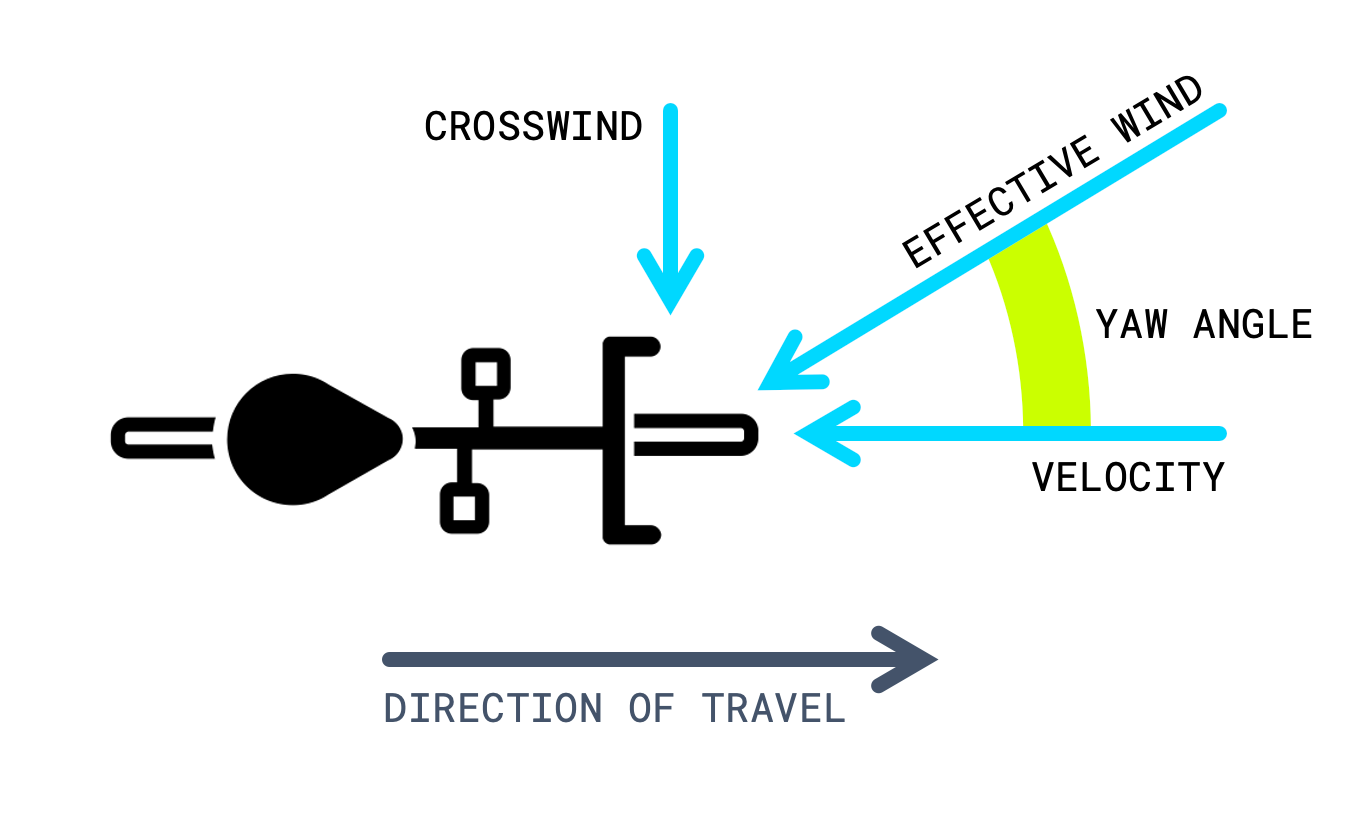
What is a yaw angle?
As a rider moves forward, they interact with any crosswind. The vector sum of the rider and wind velocities determines the "yaw angle".
This is the effective wind angle that impacts rider and equipment.
How is yaw measured?
An ultrasonic anemometer (wind sensor) was fitted to 3D-printed brackets mounted onto front & rear wheel axles. Data from each sensor was gathered using smartphones and then uploaded for analysis following each ride.
During testing, riders were asked to ride "as normal", across a range of wind conditions, ride types and ride distances. Test rides took place over a 12-month period, capturing different seasons.

What did we learn?
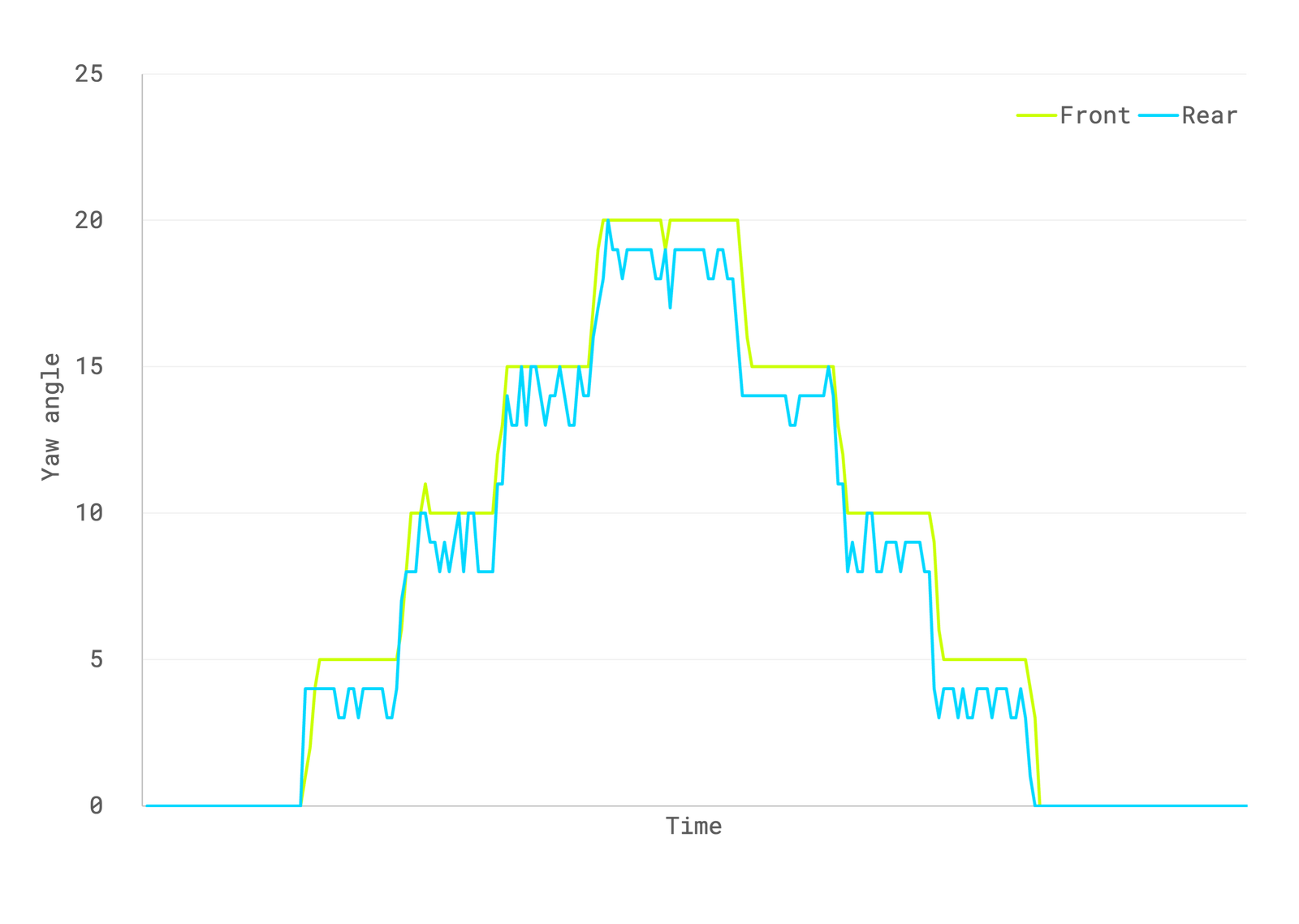
Having analysed over 25,000 data points, we could see that there was a meaningful and consistent difference between yaw angles observed at the front wheel and at the rear wheel:
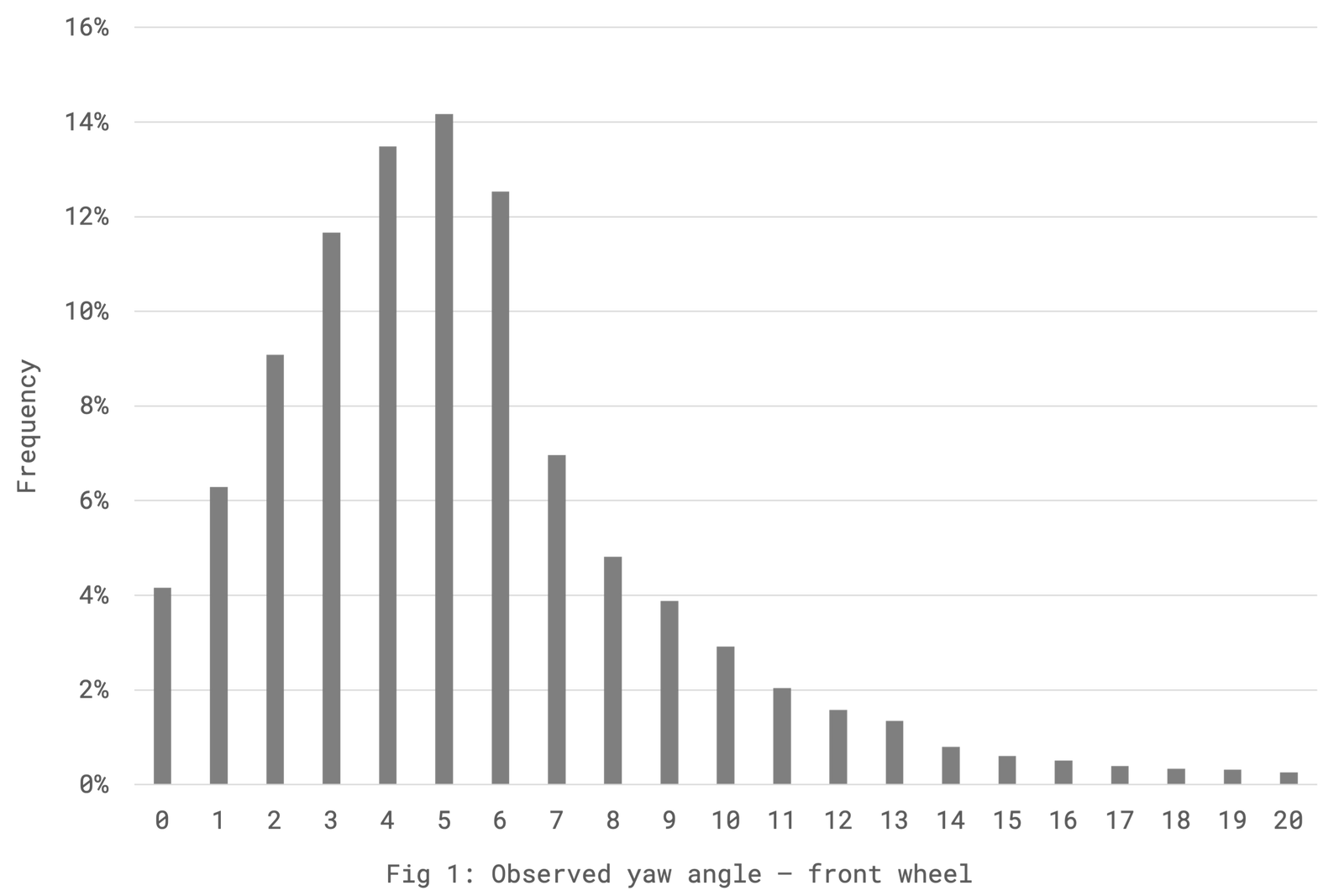
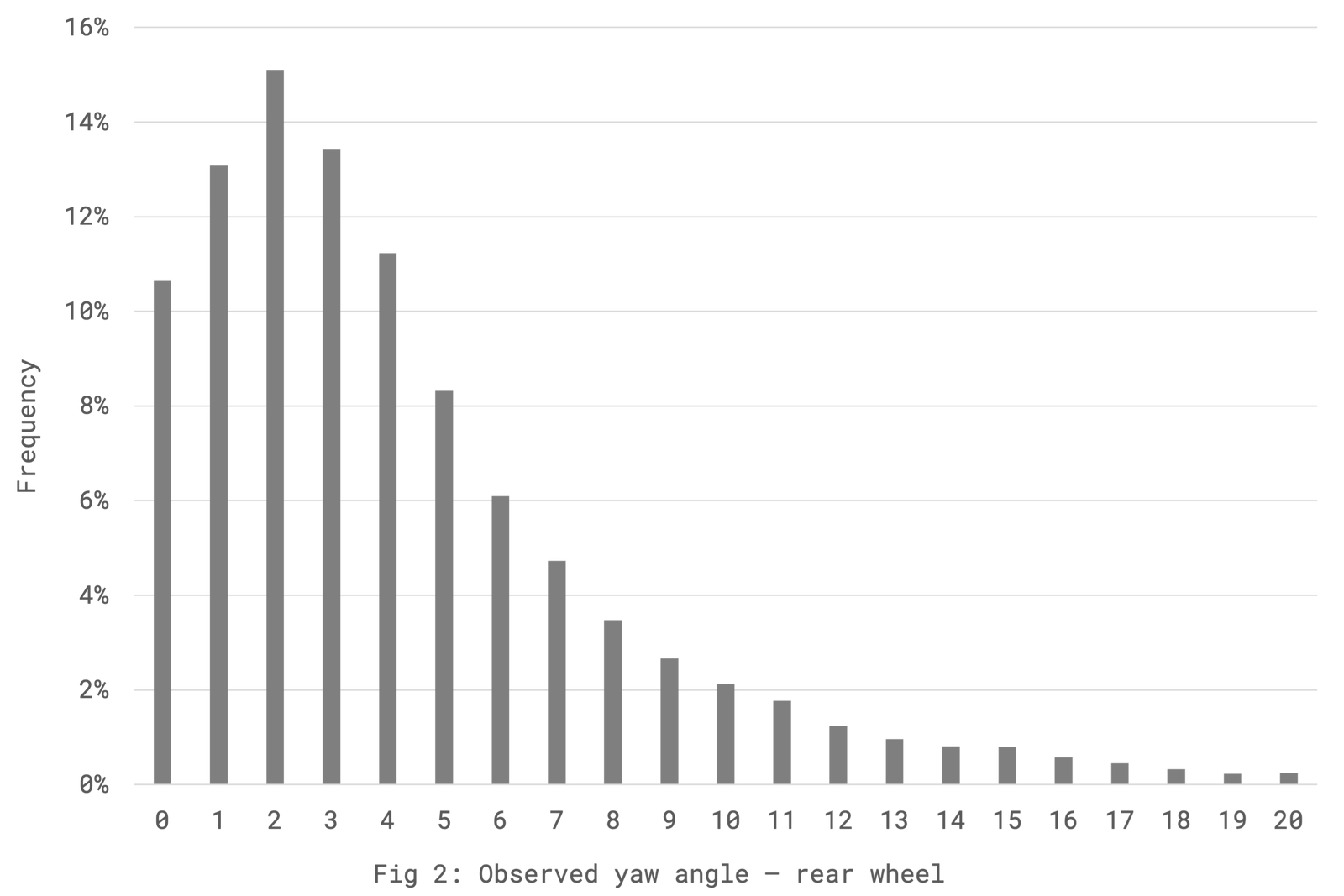
Results
On average the yaw angle at the front wheel was 1.5 degrees higher than that at the rear wheel.
This was confirmed during wind tunnel testing (see right) which showed an average difference of 1.3 degrees between front & rear wheels.
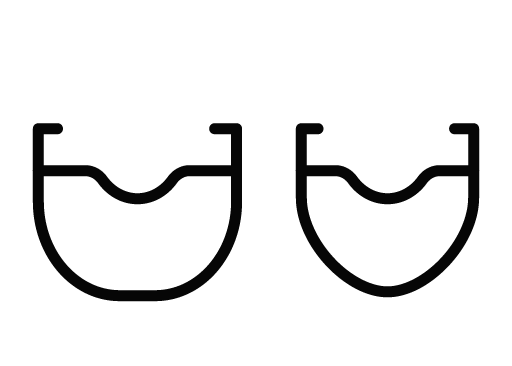
Design implementation
Data was used to develop the differential front/rear rim profiles seen across our #thinkwider wheelsets.
Front rim has a blunt leading edge to optimise handling stability at higher yaw angles.
Rear rim uses a steeper leading edge to maximise aero performance at lower yaw angles.